El Haval Jolion con tracción total, ¡qué maravilla, verdad? Pero como en todo, el diablo está en los detalles. Y en este caso, esos detalles se esconden en el software que controla este sistema. Vamos a desentrañar el funcionamiento de la tracción a las cuatro ruedas del Jolion, para que entendáis cómo funciona y, sobre todo, cuáles son sus posibles puntos débiles. No se trata de demonizar el sistema, sino de comprenderlo a fondo.
Empezaremos por las características del funcionamiento de la tracción total del Jolion. A diferencia de sistemas más tradicionales, el Jolion utiliza un sistema inteligente que distribuye el par motor entre las ruedas delanteras y traseras según las condiciones de conducción. No es un sistema de tracción total permanente, sino que se activa cuando el sistema electrónico detecta una pérdida de tracción en las ruedas delanteras. Esto se traduce en un ahorro de combustible en condiciones normales de conducción, ya que solo se utiliza la tracción trasera cuando es estrictamente necesario. Pero, ¿cómo lo hace? Ahí entra en juego el sistema de control electrónico BorgWarner.
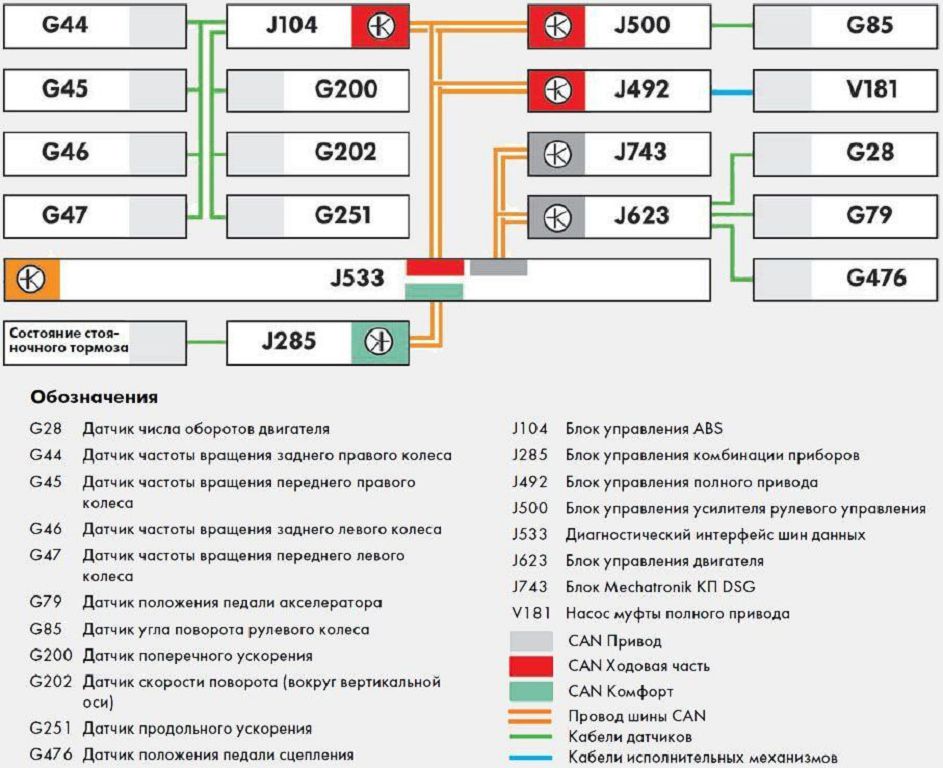
El sistema de control electrónico BorgWarner es el cerebro de la operación. Es un sistema sofisticado que utiliza una serie de sensores para monitorizar constantemente las condiciones de conducción, incluyendo la velocidad de las ruedas, el ángulo del volante, la aceleración y la posición del acelerador. Toda esta información se procesa en tiempo real para determinar la cantidad de par motor que debe enviarse a las ruedas traseras. Este proceso es increíblemente rápido y preciso, permitiendo una respuesta inmediata a cualquier cambio en las condiciones de conducción. Imaginen la complejidad: el sistema debe analizar cientos de datos por segundo para tomar decisiones en milisegundos. Es una verdadera maravilla de la ingeniería, pero también un punto potencial de fallo. Y aquí es donde entran en juego los fallos de software.
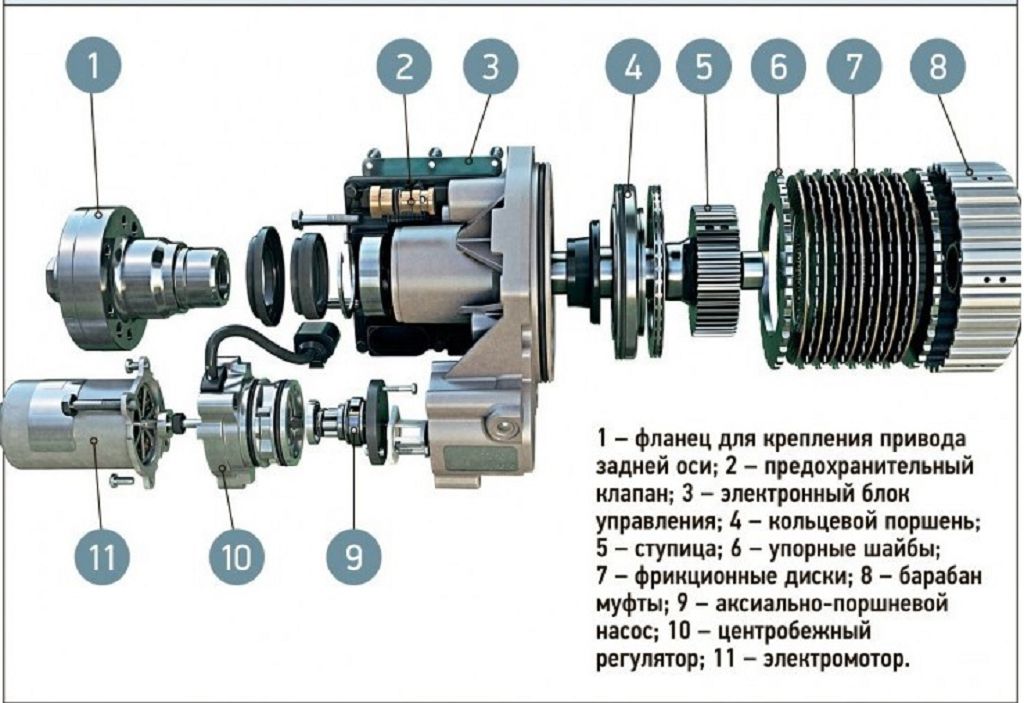
La formación, o calibración, del modelo de control dinámico del embrague es crucial para el correcto funcionamiento del sistema. Este embrague, situado en el eje trasero, es el encargado de conectar y desconectar la tracción a las cuatro ruedas. Su control es totalmente electrónico, y su funcionamiento depende de un modelo matemático que describe el comportamiento del vehículo en diferentes situaciones. Este modelo se «entrena» durante el proceso de fabricación del vehículo, y cualquier error en este proceso puede provocar un mal funcionamiento del sistema. Por ejemplo, una calibración incorrecta puede resultar en una respuesta lenta o imprecisa del sistema de tracción total, o incluso en fallos intermitentes. Es un proceso delicado, y cualquier pequeña desviación puede tener consecuencias significativas. Es por eso que es tan importante que el software esté perfectamente optimizado y libre de errores. Y, lamentablemente, como hemos visto en algunos casos, esto no siempre es así. Por eso es tan importante estar al tanto de las actualizaciones de software y las posibles soluciones que la marca pueda ofrecer. Entender el funcionamiento interno de este sistema nos permite ser más conscientes de las posibles causas de los problemas y, en consecuencia, buscar soluciones más efectivas.
Vamos a adentrarnos en el complejo sistema de tracción total del Haval Jolion, y a ver qué hay detrás de esa promesa de agarre en cualquier terreno. Empezaremos por el cerebro de la operación: el esquema del control electrónico del embrague. No estamos hablando de un simple diferencial; es un sistema sofisticado que monitorea constantemente una gran cantidad de variables. Piensen en la velocidad de cada rueda, la aceleración, el ángulo del volante, incluso la posición del acelerador. Toda esta información se procesa en milisegundos para determinar la cantidad de torque que se debe enviar a las ruedas traseras. El corazón del sistema es un embrague multidisco controlado electrónicamente. Este embrague no es un simple «encendido» o «apagado»; es un sistema de regulación continua. Puede variar la cantidad de torque que se envía a las ruedas traseras de forma gradual y precisa, adaptándose a las condiciones de conducción en tiempo real. Es decir, no se limita a conectar o desconectar las ruedas traseras; puede enviarles una porción variable de la potencia del motor, optimizando la tracción en cada momento. Esto es crucial para la eficiencia de combustible, ya que en condiciones normales de conducción, el sistema prioriza la tracción delantera para ahorrar combustible. Pero en cuanto detecta una pérdida de agarre, actúa instantáneamente para redistribuir la potencia. Es un sistema inteligente que trabaja en segundo plano, sin que el conductor tenga que intervenir directamente. Es importante entender que este sistema, aunque sofisticado, depende de la precisión de sus sensores y la eficiencia de su software. Y aquí es donde entran los posibles fallos de software que hemos visto reportados por algunos usuarios.
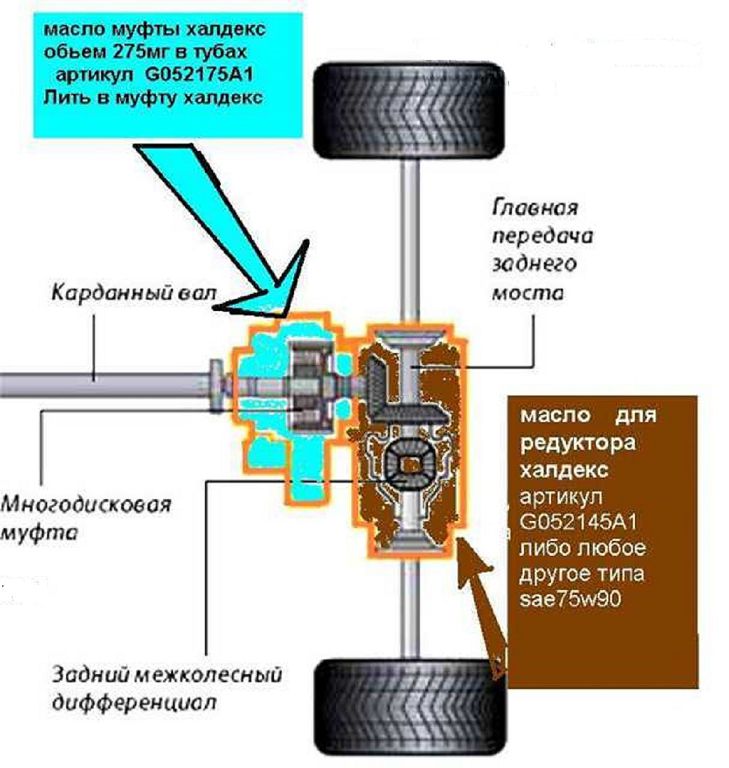
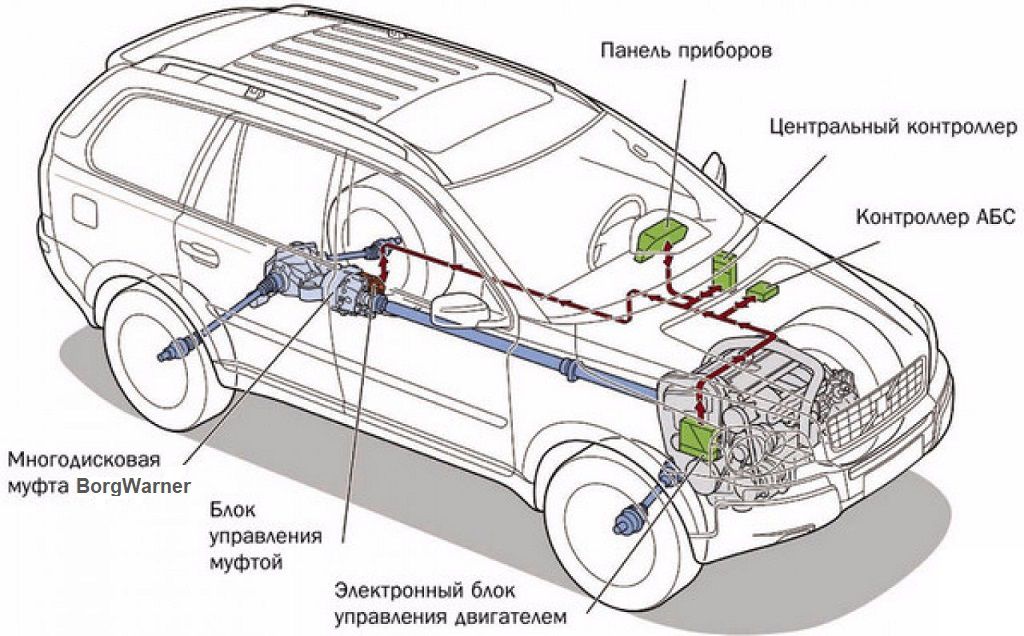
Ahora, hablemos del «hardware» que hace posible la tracción a las cuatro ruedas en el Jolion. Más allá del control electrónico, necesitamos los componentes físicos que transmiten la potencia. Tenemos el diferencial delantero, que distribuye la potencia entre las ruedas delanteras. Luego, tenemos un eje de transmisión que lleva la potencia hasta el diferencial trasero. Este diferencial trasero, a su vez, distribuye la potencia entre las ruedas traseras. Todos estos componentes son cruciales para el funcionamiento del sistema. La calidad de estos componentes, su fabricación y su mantenimiento, son factores que influyen directamente en la fiabilidad del sistema de tracción total. Un fallo en cualquiera de estas partes puede afectar significativamente el rendimiento, o incluso inutilizar completamente el sistema. Por ejemplo, un problema en el eje de transmisión podría provocar vibraciones, ruidos extraños, o incluso la rotura del eje. Un fallo en el diferencial trasero podría resultar en una pérdida de tracción en las ruedas traseras, comprometiendo la seguridad en condiciones de baja adherencia. Es importante realizar revisiones periódicas para detectar cualquier problema potencial en estos componentes.
En resumen, el sistema de tracción total del Haval Jolion es un sistema complejo que combina un sofisticado control electrónico con componentes mecánicos precisos. Si bien ofrece una mejora significativa en la tracción y la seguridad en condiciones adversas, no está exento de posibles fallos, especialmente aquellos relacionados con el software de control. Es fundamental estar al tanto de los posibles problemas que pueden surgir, tanto en el «hardware» como en el «software», para poder tomar las medidas necesarias y asegurar un funcionamiento óptimo y seguro del sistema. Recuerda que la información que hemos compartido aquí es para fines informativos, y siempre es recomendable consultar con un mecánico especializado para cualquier duda o problema con tu vehículo.